Der Roboter
Posted on Mai 18th, 2014
Basis
Als Basis für unseren Roboter dient der von LEGO entwickelte Brick, von dem alle Befehle ausgehen. Die neuere Version, den EV3, haben wir abgelehnt, da er mit unserem Multiplexer nicht kompatibel ist. Da die neuen Motoren aber in Richtung Leistung und Stromverbrauch um Längen besser ist, haben wir sie den alten Motoren vorgezogen.
Bei diesen neuen Motoren gibt es 2 Arten:
- Motoren (2) für den Antrieb (Weniger Drehzahl dafür höhere Kraft)
- Motor (1) für die Zange (Mehr Drehzahl dafür weniger Kraft)
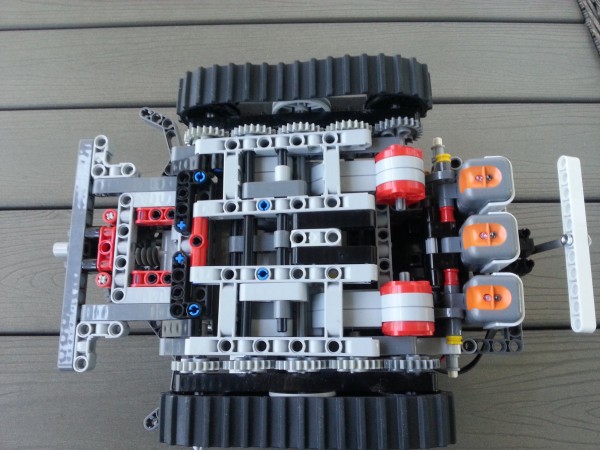
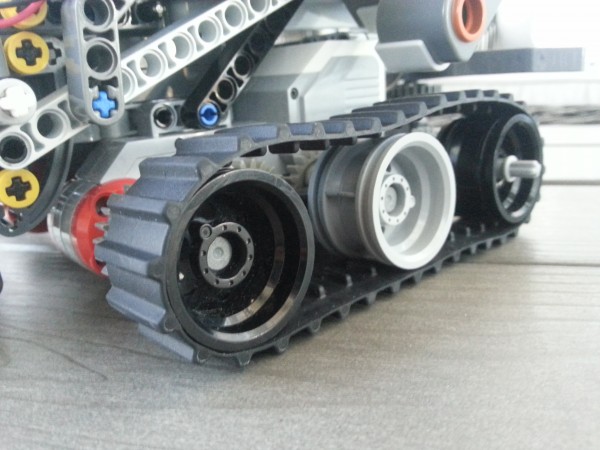
Sensoren + Ketten
Vor allem beim drehen im Stand und bei der Rampe bemerkt man, dass Ketten viel mehr Halt haben als Reifen wesshalb wir sie verwenden.
Sehen wir uns nun die Sensoren etwas genauer an. Die zuerst verwendeten neuen Licht-Sensoren, haben wir nun durch alte ersetzt (3 Stück). In erster Linie wegen ihrer Genauigkeit, aber auch da die neuen nicht mit dem Brick kompatibel sind.
Der Touch-Sensor (nicht LEGO) ist vorne montiert und ist viel kleiner und genauer als die LEGO-Touch-Sensoren.
Da uns in letzter Zeit aufgefallen ist, dass der neue Infrarot-Sensor Plexiglas nicht erkennt, haben wir uns auch in der Hinsicht für das alte Model, einen Ultraschall-Sensor, entschieden.
Ein weiterer, vor allem für die Rampe und die Speedbumps, sehr nützlicher Sensor ist der Neigungs-Sensor (LEGO).
Außerdem verwenden wir einen Mutiplexer (LEGO) welchen wir für weitere Sensor-Anschlüsse benötigen.
Zusammenfassung (Sensoren & Motoren):
- Multplexer
- 1 Neigungs-Sensor
- 3 Licht-Sensoren
- 2 Ultraschall-Sensoren
- 1 Touch-Sensor
- 2 Motoren (Antrieb)
- 1 Motor (Zange)

Sehr gut geschrieben, freue mich schon auf Bilder
Bilder sind da
Sehr schön, ich kann den Tisch sehr gut erkennen